算法-[足式机器人]Part2 Dr. CAN学习笔记-数学基础Ch0-4线性时不变系统中的冲激响应与卷积
推荐 原创本文仅供学习使用
本文参考:
B站:DR_CAN
Dr. CAN学习笔记-数学基础Ch0-4线性时不变系统中的冲激响应与卷积
线性时不变系统 : LIT System
冲激响应:Impluse Response
卷积:Convolution
1. LIT System:Linear Time Invariant
-
运算operator : O { ⋅ } O\left\{ \cdot \right\} O{ ⋅}
I n p u t O { f ( t ) } = o u t p u t x ( t ) \begin{array}{c} Input\\ O\left\{ f\left( t \right) \right\}\\ \end{array}=\begin{array}{c} output\\ x\left( t \right)\\ \end{array} InputO{ f(t)}=outputx(t) -
线性——
叠加原理superpositin principle:
{ O { f 1 ( t ) + f 2 ( t ) } = x 1 ( t ) + x 2 ( t ) O { a f 1 ( t ) } = a x 1 ( t ) O { a 1 f 1 ( t ) + a 2 f 2 ( t ) } = a 1 x 1 ( t ) + a 2 x 2 ( t ) \begin{cases} O\left\{ f_1\left( t \right) +f_2\left( t \right) \right\} =x_1\left( t \right) +x_2\left( t \right)\\ O\left\{ af_1\left( t \right) \right\} =ax_1\left( t \right)\\ O\left\{ a_1f_1\left( t \right) +a_2f_2\left( t \right) \right\} =a_1x_1\left( t \right) +a_2x_2\left( t \right)\\ \end{cases} ⎩ ⎨ ⎧O{ f1(t)+f2(t)}=x1(t)+x2(t)O{ af1(t)}=ax1(t)O{ a1f1(t)+a2f2(t)}=a1x1(t)+a2x2(t) -
时不变Time Invariant:
O { f ( t ) } = x ( t ) ⇒ O { f ( t − τ ) } = x ( t − τ ) O\left\{ f\left( t \right) \right\} =x\left( t \right) \Rightarrow O\left\{ f\left( t-\tau \right) \right\} =x\left( t-\tau \right) O{ f(t)}=x(t)⇒O{ f(t−τ)}=x(t−τ)
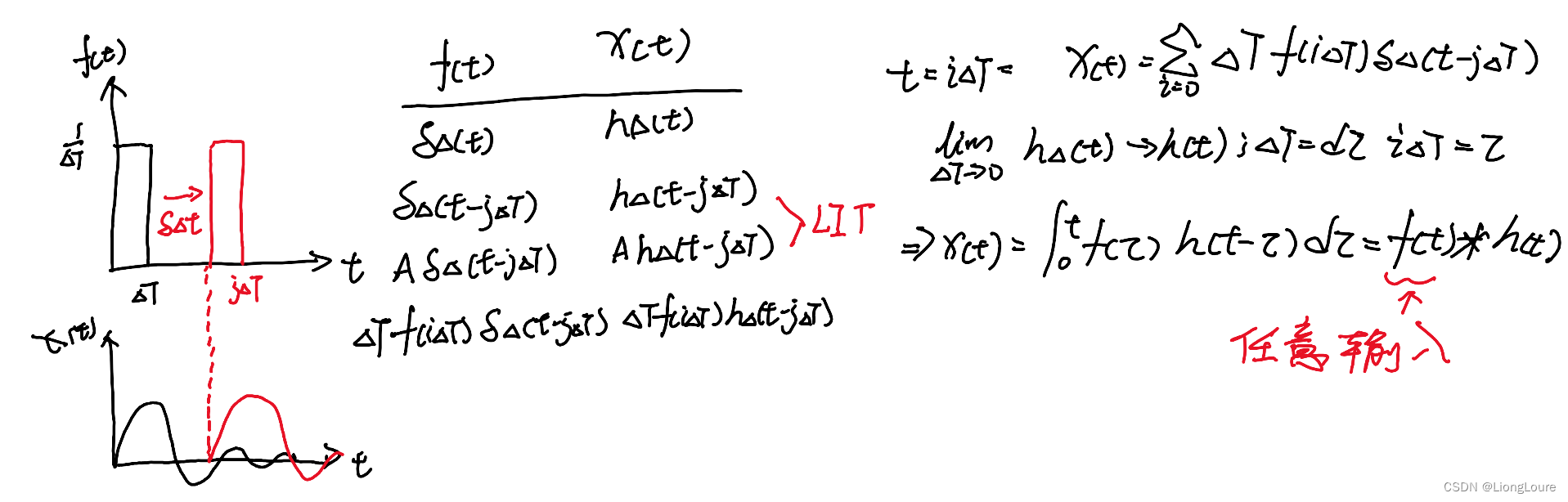
2. 卷积 Convolution

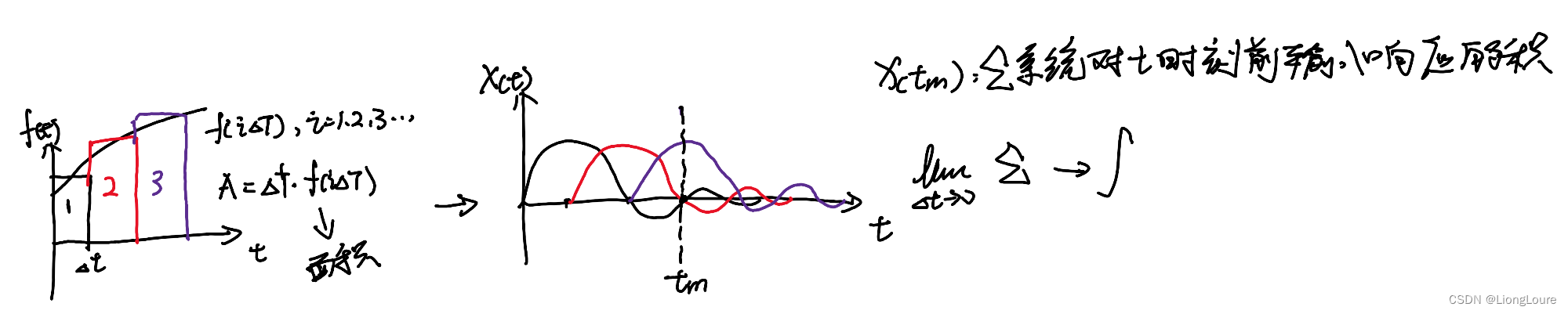
3. 单位冲激 Unit Impulse——Dirac Delta
LIT系统,h(t)可以完全定义系统

更多【算法-[足式机器人]Part2 Dr. CAN学习笔记-数学基础Ch0-4线性时不变系统中的冲激响应与卷积】相关视频教程:www.yxfzedu.com
相关文章推荐
- 爬虫-Python 爬虫基础 - 其他
- ui-Qt6,使用 UI 界面完成命令执行自动化的设计 - 其他
- 物联网-基于STM32的设计智慧超市管理系统(带收银系统+物联网环境监测) - 其他
- python-【Python基础】 Python设计模式之单例模式介绍 - 其他
- 物联网-物联网对接协议 - 其他
- 安全-远程运维用什么软件?可以保障更安全? - 其他
- 阿里云-STM32G0+EMW3080+阿里云飞燕平台实现单片机WiFi智能联网功能(三)STM32G0控制EMW3080实现IoT功能 - 其他
- 前端框架-vue项目中页面遇到404报错 - 其他
- 安全-vivo 网络端口安全建设技术实践 - 其他
- 前端框架-前端框架Vue学习 ——(五)前端工程化Vue-cli脚手架 - 其他
- 物联网-ZZ038 物联网应用与服务赛题第D套 - 其他
- 爬虫-网络爬虫的实战项目:使用JavaScript和Axios爬取Reddit视频并进行数据分析 - 其他
- c语言-ZZ038 物联网应用与服务赛题第C套 - 其他
- c语言-cordova Xcode打包ios以及发布流程(ionic3适用) - 其他
- 物联网-Xcode15 framework ‘CoreAudioTypes‘ not found - 其他
- 科技-打造高效运营底座,极智嘉一体化软件系统彰显科技威能 - 其他
- golang-深入剖析Golang中单例模式 - 其他
- 网络-工业自动化工厂PLC远程控制网关物联网应用 - 其他
- react.js-React Native自学笔记 - 其他
- android-【Android】Lombok for Android Studio 离线插件 - 其他
2):严禁色情、血腥、暴力
3):严禁发布任何形式的广告贴
4):严禁发表关于中国的政治类话题
5):严格遵守中国互联网法律法规
6):有侵权,疑问可发邮件至service@yxfzedu.com
