学习-3DGS学习(三)—— 球谐函数
推荐 原创球谐函数
直观了解
参考文章:https://zhuanlan.zhihu.com/p/351289217
球谐函数可以类比泰勒展开,傅里叶级数。都是通过一组不同阶的基函数线性组合而成,只不过傅里叶级数的基函数是三角函数,而球谐函数的基函数是球函数。即正交基为球函数,极坐标即球函数系数。
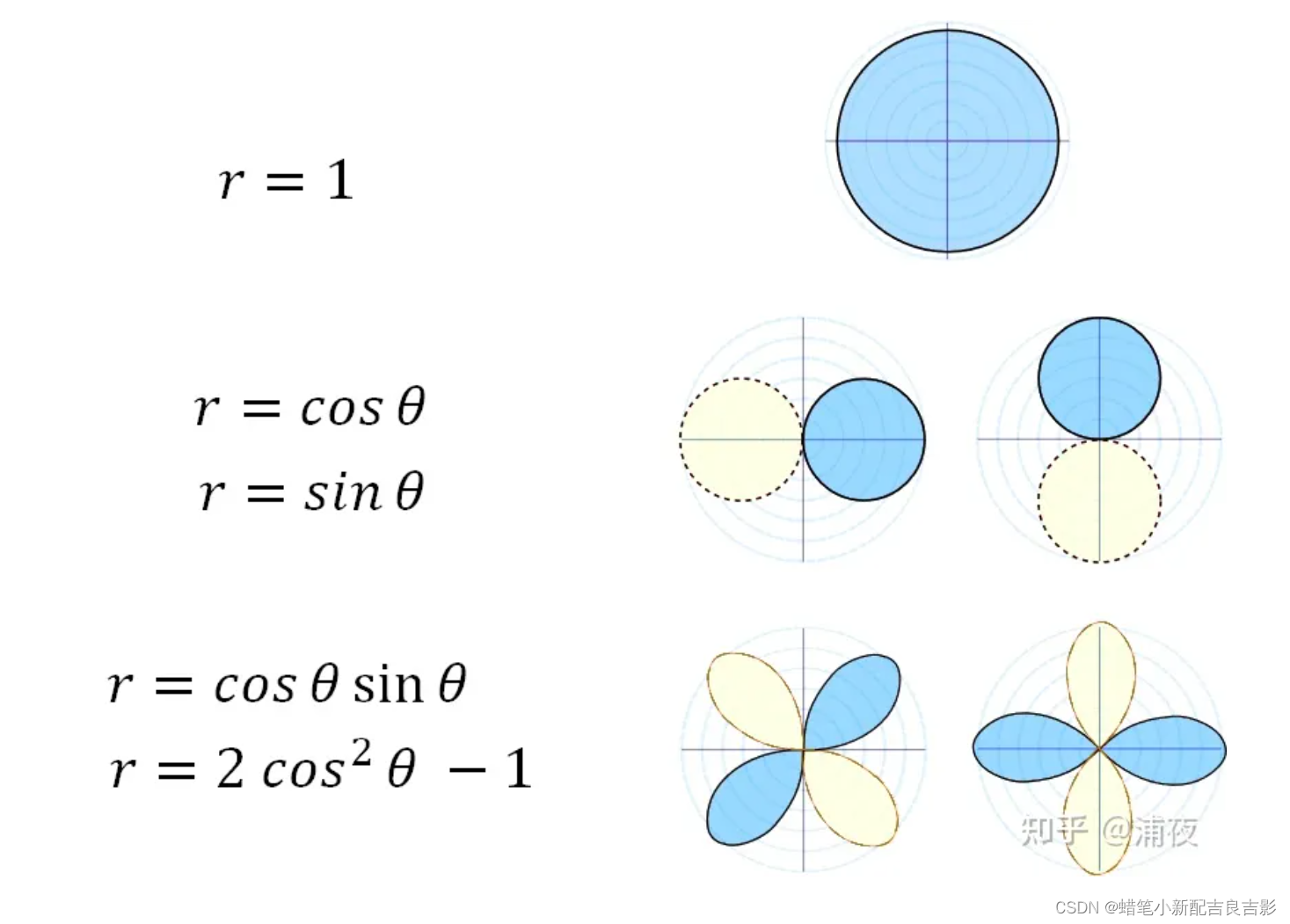
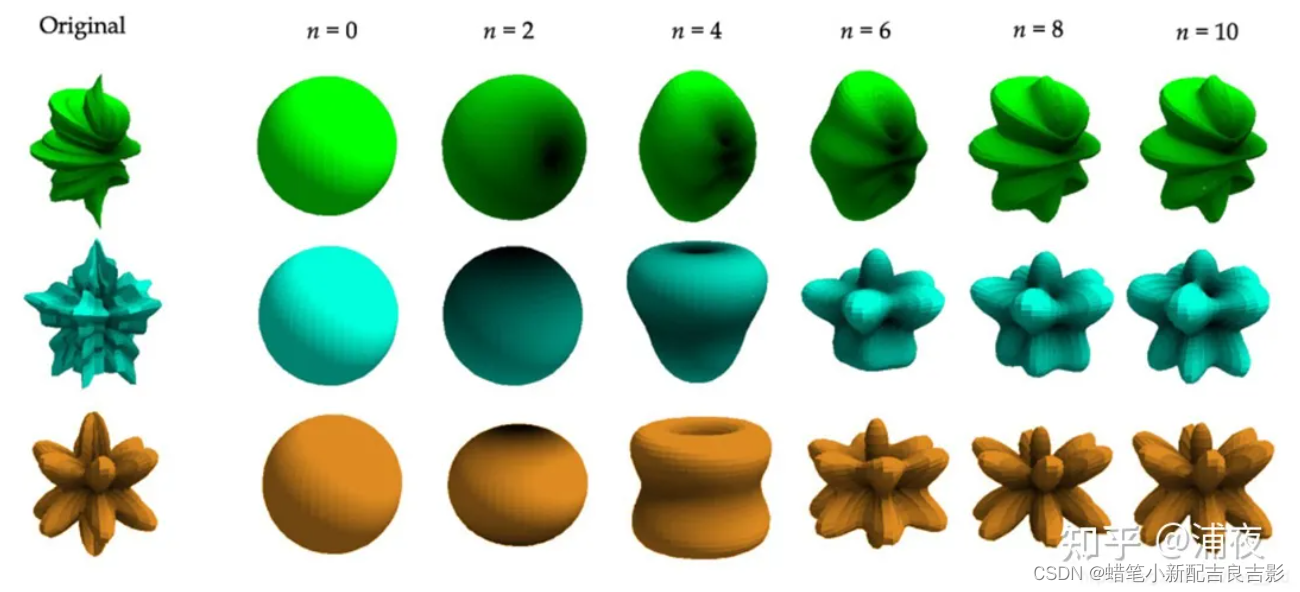
同样就像傅里叶变换拟合曲线一样,球谐函数拟合3d物体时,所用阶数越高,拟合越贴切,但是也有可能出现过拟合的情况。
球谐函数性质
- 正交性:各个基函数之间线性独立
- 旋转不变性:环境光照变化之后只需要简单的计算就可以得到光源旋转之后的结果,在后续应用中补充。
若将函数所表示的距离变成颜色上的数值差异,就可以用球谐函数来拟合颜色信息。
球谐光照
参考文章:
漫反射光照函数
L ( p , w o ) = ∫ Ω L ( p , ω i ) n ⋅ ω i d w i L(p,w_o)=\int_{\Omega}L(p,\omega_i)n\cdot\omega_idw_i L(p,wo)=∫ΩL(p,ωi)n⋅ωidwi
- Ω \Omega Ω为半球空间,入射光方向 w i w_i wi,观察方向 w o w_o wo,着色点 p p p, n n n 为着色点 p p p 的法线。
进行替换
{ l i g h t ( w ) = L ( p , w ) t ( w ) = n ⋅ w \left.\left\{\begin{aligned}&light(w)=L(p,w)\\&t(w)=n\cdot w\end{aligned}\right.\right. {
light(w)=L(p,w)t(w)=n⋅w
进行球谐函数展开
{ l i g h t ( w ) = ∑ i = 0 L i Y i ( w ) t ( w ) = ∑ i = 0 t i Y i ( w ) \left.\left\{\begin{aligned}&light(w)=\sum_{i=0}L_iY_i(w)\\&t(w)=\sum_{i=0}t_iY_i(w)\end{aligned}\right.\right. ⎩
⎨
⎧light(w)=i=0∑LiYi(w)t(w)=i=0∑tiYi(w)
带回光照函数模型化简
L ( p , w o ) = ∑ i = 0 L i t i L(p,w_o)=\sum_{i=0}L_it_i L(p,wo)=i=0∑Liti
此时形式简单,但是实际上计算时,需要预计算 t i t_i ti,即对每一组法线方向都要计算一组球谐函数得到其系数,实际开销较大。于是利用球谐函数旋转不变性的性质继续推导得到
L ( n ) = ∑ l = 0 ∞ ∑ m = − l l 4 π 2 l + 1 L l m t l Y l m ( n ) L(n)=\sum_{l=0}^\infty\sum_{m=-l}^l\sqrt{\frac{4\pi}{2l+1}}L_l^mt_lY_l^m(n) L(n)=l=0∑∞m=−l∑l2l+14πLlmtlYlm(n)
此时只需要通过顶点着色器传入的法向量n计算出球谐函数 Y l m ( n ) Y_l^m(n) Ylm(n),再与常数相乘,不需按原来要对每个t都单独通过积分求解。
更多【学习-3DGS学习(三)—— 球谐函数】相关视频教程:www.yxfzedu.com
相关文章推荐
- python-pycharm pro v2023.2.4(Python编辑开发) - 其他
- 云原生-修炼k8s+flink+hdfs+dlink(七:flinkcdc) - 其他
- 算法-《深入浅出进阶篇》洛谷P4147 玉蟾宫——悬线法dp - 其他
- 接口隔离原则-ISP图像处理Pipeline - 其他
- 编程技术-WPF中Dispatcher对象的用途是什么 - 其他
- 学习-ARM & Linux 基础学习 / Ubuntu 下的包管理 / apt工具 - 其他
- 编程技术-【ROS】RViz2源码分析(一):介绍 - 其他
- 计算机视觉-Pytorch实战教程(五)-计算机视觉基础 - 其他
- 编程技术-【Java 进阶篇】JQuery 案例:qq表情选择,表达情感的小黄脸 - 其他
- java-Jenkins入门——安装docker版的Jenkins & 配置mvn,jdk等 & 使用案例初步 & 遇到的问题及解决 - 其他
- 学习-科研学习|科研软件——有序多分类Logistic回归的SPSS教程! - 其他
- 编程技术-如何在 Linux 上部署 RabbitMQ - 其他
- 编程技术-WPF路由事件 - 其他
- 算法-通信信道:无线信道中衰落的类型和分类 - 其他
- 编程技术-复杂度分析 - 其他
- 编程技术-ReentrantLock通过Condition实现锁对象的监视器功能 - 其他
- 编程技术-如何在3DMax中使用超过16个材质ID通道? - 其他
- 安全-OpenAtom OpenHarmony三方库创建发布及安全隐私检测 - 其他
- elasticsearch-Elasticsearch docker-compose 使用 Logstash 从 JSON 文件中预加载数据 - 其他
- 编程技术-C++模板 - 其他
2):严禁色情、血腥、暴力
3):严禁发布任何形式的广告贴
4):严禁发表关于中国的政治类话题
5):严格遵守中国互联网法律法规
6):有侵权,疑问可发邮件至service@yxfzedu.com
- objective-c-【Objective-C】Objective-C汇总
- 云原生-SpringCloud微服务:Eureka
- react.js-react+星火大模型,构建上下文ai问答页面(可扩展)
- node.js-taro(踩坑) npm run dev:weapp 微信小程序开发者工具预览报错
- 云原生-Paas-云原生-容器-编排-持续部署
- 网络-漏洞扫描工具的编写
- 组合模式-二十三种设计模式全面解析-组合模式与迭代器模式的结合应用:构建灵活可扩展的对象结构
- java-【Proteus仿真】【51单片机】多路温度控制系统
- java-【Vue 透传Attributes】
- github-在gitlab中指定自定义 CI/CD 配置文件