c#-C# Open Vocabulary Object Detection 部署开放域目标检测
推荐 原创目录
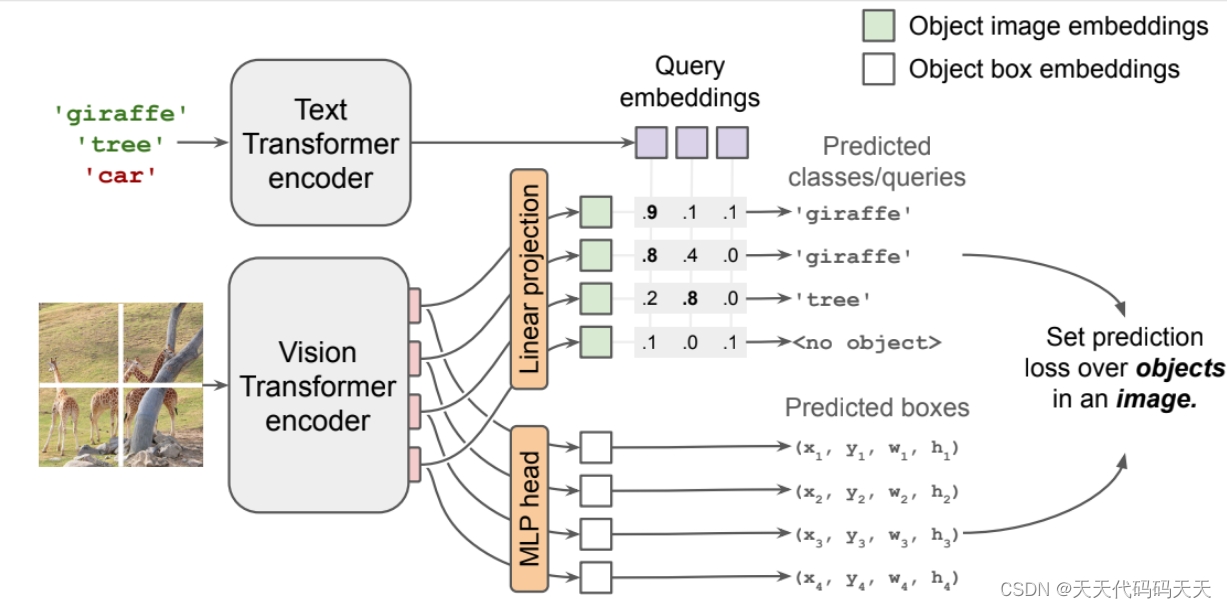
C# Open Vocabulary Object Detection 部署开放域目标检测
介绍
训练源码地址:https://github.com/google-research/scenic/tree/main/scenic/projects/owl_vit
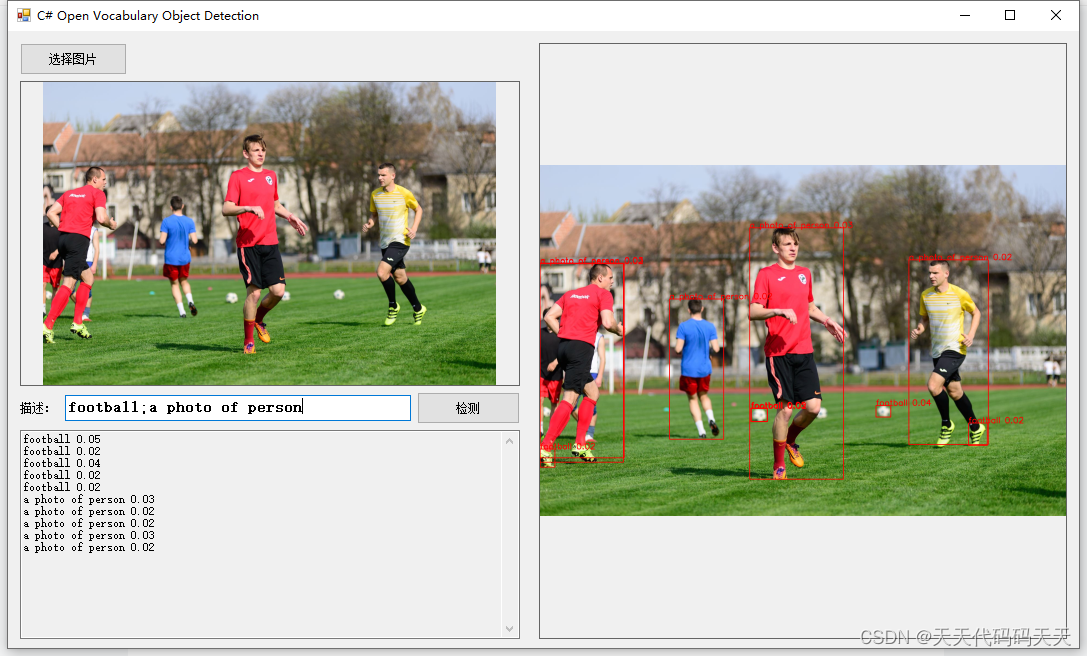
效果
模型信息
owlvit-image.onnx
Inputs
-------------------------
name:pixel_values
tensor:Float[1, 3, 768, 768]
---------------------------------------------------------------
Outputs
-------------------------
name:image_embeds
tensor:Float[1, 24, 24, 768]
name:pred_boxes
tensor:Float[1, 576, 4]
---------------------------------------------------------------
owlvit-post.onnx
Inputs
-------------------------
name:image_embeds
tensor:Float[1, 24, 24, 768]
name:/owlvit/Div_output_0
tensor:Float[1, 512]
name:input_ids
tensor:Int64[1, 16]
---------------------------------------------------------------
Outputs
-------------------------
name:logits
tensor:Float[-1, 576, 1]
---------------------------------------------------------------
owlvit-text.onnx
Inputs
-------------------------
name:input_ids
tensor:Int64[1, 16]
name:attention_mask
tensor:Int64[1, 16]
---------------------------------------------------------------
Outputs
-------------------------
name:text_embeds
tensor:Float[1, 1, 512]
---------------------------------------------------------------
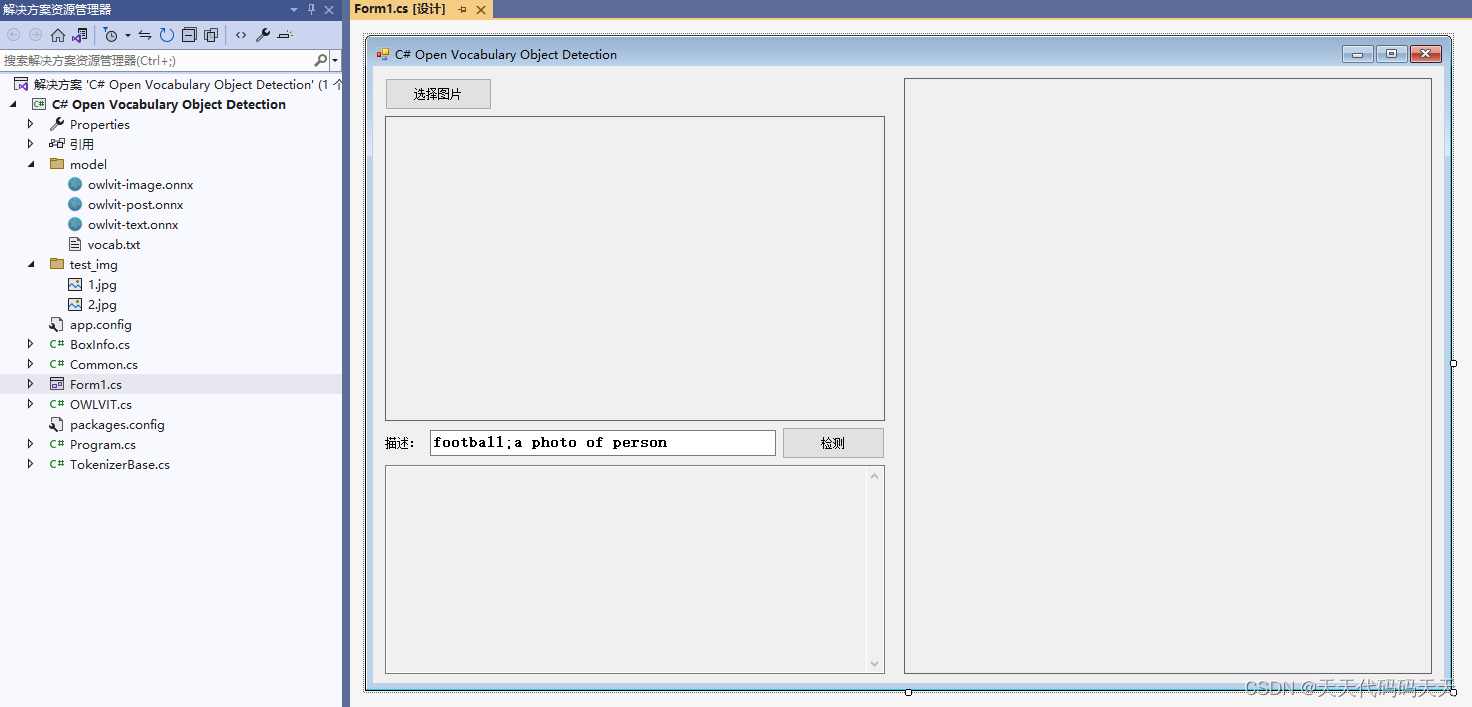
项目
代码
Form1.cs
using OpenCvSharp;
using System;
using System.Collections.Generic;
using System.Drawing;
using System.Linq;
using System.Text;
using System.Windows.Forms;
namespace Onnx_Demo
{
public partial class Form1 : Form
{
public Form1()
{
InitializeComponent();
}
OWLVIT owlvit = new OWLVIT("model/owlvit-image.onnx", "model/owlvit-text.onnx", "model/owlvit-post.onnx", "model/vocab.txt");
string image_path = "";
string fileFilter = "*.*|*.bmp;*.jpg;*.jpeg;*.tiff;*.tiff;*.png";
StringBuilder sb = new StringBuilder();
Mat image;
Mat result_image;
private void button2_Click(object sender, EventArgs e)
{
OpenFileDialog ofd = new OpenFileDialog();
ofd.Filter = fileFilter;
if (ofd.ShowDialog() != DialogResult.OK) return;
pictureBox1.Image = null;
pictureBox2.Image = null;
txtInfo.Text = "";
image_path = ofd.FileName;
pictureBox2.Image = new Bitmap(image_path);
image = new Mat(image_path);
}
private void button3_Click(object sender, EventArgs e)
{
if (image_path == "")
{
return;
}
if (String.IsNullOrEmpty(txt_input_text.Text))
{
return;
}
pictureBox1.Image = null;
txtInfo.Text = "检测中,请稍等……";
button3.Enabled=false;
if (pictureBox1.Image!=null)
{
pictureBox1.Image.Dispose();
pictureBox1.Image = null;
}
Application.DoEvents();
List<string> texts = txt_input_text.Text.Split(new char[] { ';' }, StringSplitOptions.RemoveEmptyEntries).ToList();
owlvit.encode_texts(texts);
List<BoxInfo> objects = owlvit.detect(image, texts);
result_image = image.Clone();
sb.Clear();
for (int i = 0; i < objects.Count; i++)
{
Cv2.Rectangle(result_image, objects[i].box, new Scalar(0, 0, 255), 2);
Cv2.PutText(result_image, objects[i].text + " " + objects[i].prob.ToString("F2"), new OpenCvSharp.Point(objects[i].box.X, objects[i].box.Y), HersheyFonts.HersheySimplex, 1, new Scalar(0, 0, 255), 2); ;
sb.AppendLine(objects[i].text + " " + objects[i].prob.ToString("F2"));
}
pictureBox1.Image = new Bitmap(result_image.ToMemoryStream());
button3.Enabled = true;
txtInfo.Text = sb.ToString();
}
private void Form1_Load(object sender, EventArgs e)
{
image_path = "test_img/2.jpg";
pictureBox2.Image = new Bitmap(image_path);
image = new Mat(image_path);
owlvit.encode_image(image);
}
}
}
using OpenCvSharp;
using System;
using System.Collections.Generic;
using System.Drawing;
using System.Linq;
using System.Text;
using System.Windows.Forms;
namespace Onnx_Demo
{
public partial class Form1 : Form
{
public Form1()
{
InitializeComponent();
}
OWLVIT owlvit = new OWLVIT("model/owlvit-image.onnx", "model/owlvit-text.onnx", "model/owlvit-post.onnx", "model/vocab.txt");
string image_path = "";
string fileFilter = "*.*|*.bmp;*.jpg;*.jpeg;*.tiff;*.tiff;*.png";
StringBuilder sb = new StringBuilder();
Mat image;
Mat result_image;
private void button2_Click(object sender, EventArgs e)
{
OpenFileDialog ofd = new OpenFileDialog();
ofd.Filter = fileFilter;
if (ofd.ShowDialog() != DialogResult.OK) return;
pictureBox1.Image = null;
pictureBox2.Image = null;
txtInfo.Text = "";
image_path = ofd.FileName;
pictureBox2.Image = new Bitmap(image_path);
image = new Mat(image_path);
}
private void button3_Click(object sender, EventArgs e)
{
if (image_path == "")
{
return;
}
if (String.IsNullOrEmpty(txt_input_text.Text))
{
return;
}
pictureBox1.Image = null;
txtInfo.Text = "检测中,请稍等……";
button3.Enabled=false;
if (pictureBox1.Image!=null)
{
pictureBox1.Image.Dispose();
pictureBox1.Image = null;
}
Application.DoEvents();
List<string> texts = txt_input_text.Text.Split(new char[] { ';' }, StringSplitOptions.RemoveEmptyEntries).ToList();
owlvit.encode_texts(texts);
List<BoxInfo> objects = owlvit.detect(image, texts);
result_image = image.Clone();
sb.Clear();
for (int i = 0; i < objects.Count; i++)
{
Cv2.Rectangle(result_image, objects[i].box, new Scalar(0, 0, 255), 2);
Cv2.PutText(result_image, objects[i].text + " " + objects[i].prob.ToString("F2"), new OpenCvSharp.Point(objects[i].box.X, objects[i].box.Y), HersheyFonts.HersheySimplex, 1, new Scalar(0, 0, 255), 2); ;
sb.AppendLine(objects[i].text + " " + objects[i].prob.ToString("F2"));
}
pictureBox1.Image = new Bitmap(result_image.ToMemoryStream());
button3.Enabled = true;
txtInfo.Text = sb.ToString();
}
private void Form1_Load(object sender, EventArgs e)
{
image_path = "test_img/2.jpg";
pictureBox2.Image = new Bitmap(image_path);
image = new Mat(image_path);
owlvit.encode_image(image);
}
}
}
OWLVIT.cs
using Microsoft.ML.OnnxRuntime;
using Microsoft.ML.OnnxRuntime.Tensors;
using OpenCvSharp;
using OpenCvSharp.Dnn;
using System;
using System.Collections.Generic;
using System.Linq;
namespace Onnx_Demo
{
public class OWLVIT
{
float bbox_threshold = 0.02f;
int inpWidth = 768;
int inpHeight = 768;
float[] mean = new float[] { 0.48145466f, 0.4578275f, 0.40821073f };
float[] std = new float[] { 0.26862954f, 0.26130258f, 0.27577711f };
Net net;
float[] image_features_input;
SessionOptions options;
InferenceSession onnx_session;
List<NamedOnnxValue> input_container;
IDisposableReadOnlyCollection<DisposableNamedOnnxValue> result_infer;
DisposableNamedOnnxValue[] results_onnxvalue;
Tensor<float> result_tensors;
TokenizerBase tokenizer;
SessionOptions options_transformer;
InferenceSession onnx_session_transformer;
float[] image_features;
List<long[]> input_ids = new List<long[]>();
List<float[]> text_features = new List<float[]>();
long[] attention_mask;
int len_image_feature = 24 * 24 * 768;
int cnt_pred_boxes = 576;
int len_text_token = 16;
int context_length = 52;
int len_text_feature = 512;
int[] image_features_shape = { 1, 24, 24, 768 };
int[] text_features_shape = { 1, 512 };
public int imgnum = 0;
public List<string> imglist = new List<string>();
List<Rect2f> pred_boxes = new List<Rect2f>();
public OWLVIT(string image_modelpath, string text_modelpath, string decoder_model_path, string vocab_path)
{
net = CvDnn.ReadNetFromOnnx(image_modelpath);
input_container = new List<NamedOnnxValue>();
options = new SessionOptions();
options.LogSeverityLevel = OrtLoggingLevel.ORT_LOGGING_LEVEL_INFO;
options.AppendExecutionProvider_CPU(0);
onnx_session = new InferenceSession(text_modelpath, options);
options_transformer = new SessionOptions();
options_transformer.LogSeverityLevel = OrtLoggingLevel.ORT_LOGGING_LEVEL_INFO;
options_transformer.AppendExecutionProvider_CPU(0);
onnx_session_transformer = new InferenceSession(decoder_model_path, options);
load_tokenizer(vocab_path);
}
void load_tokenizer(string vocab_path)
{
tokenizer = new TokenizerClip();
tokenizer.load_tokenize(vocab_path);
}
Mat normalize_(Mat src)
{
Cv2.CvtColor(src, src, ColorConversionCodes.BGR2RGB);
Mat[] bgr = src.Split();
for (int i = 0; i < bgr.Length; ++i)
{
bgr[i].ConvertTo(bgr[i], MatType.CV_32FC1, 1.0 / (255.0 * std[i]), (0.0 - mean[i]) / std[i]);
}
Cv2.Merge(bgr, src);
foreach (Mat channel in bgr)
{
channel.Dispose();
}
return src;
}
float sigmoid(float x)
{
return (float)(1.0f / (1.0f + Math.Exp(-x)));
}
public unsafe void encode_image(Mat srcimg)
{
pred_boxes.Clear();
Mat temp_image = new Mat();
Cv2.Resize(srcimg, temp_image, new Size(inpWidth, inpHeight));
Mat normalized_mat = normalize_(temp_image);
Mat blob = CvDnn.BlobFromImage(normalized_mat);
net.SetInput(blob);
//模型推理,读取推理结果
Mat[] outs = new Mat[2] { new Mat(), new Mat() };
string[] outBlobNames = net.GetUnconnectedOutLayersNames().ToArray();
net.Forward(outs, outBlobNames);
float* ptr_feat = (float*)outs[0].Data;
image_features = new float[len_image_feature];
for (int i = 0; i < len_image_feature; i++)
{
image_features[i] = ptr_feat[i];
}
float* ptr_box = (float*)outs[1].Data;
Rect2f temp;
for (int i = 0; i < cnt_pred_boxes; i++)
{
float xc = ptr_box[i * 4 + 0] * inpWidth;
float yc = ptr_box[i * 4 + 1] * inpHeight;
temp = new Rect2f();
temp.Width = ptr_box[i * 4 + 2] * inpWidth;
temp.Height = ptr_box[i * 4 + 3] * inpHeight;
temp.X = (float)(xc - temp.Width * 0.5);
temp.Y = (float)(yc - temp.Height * 0.5);
pred_boxes.Add(temp);
}
}
public unsafe void encode_texts(List<string> texts)
{
List<List<int>> text_token = new List<List<int>>(texts.Count);
for (int i = 0; i < texts.Count; i++)
{
text_token.Add(new List<int>());
}
text_features.Clear();
input_ids.Clear();
for (int i = 0; i < texts.Count; i++)
{
tokenizer.encode_text(texts[i], text_token[i]);
int len_ids = text_token[i].Count;
long[] temp_ids = new long[len_text_token];
attention_mask = new long[len_text_token];
for (int j = 0; j < len_text_token; j++)
{
if (j < len_ids)
{
temp_ids[j] = text_token[i][j];
attention_mask[j] = 1;
}
else
{
temp_ids[j] = 0;
attention_mask[j] = 0;
}
}
input_ids.Add(temp_ids);
input_container.Clear();
Tensor<long> input_tensor = new DenseTensor<long>(input_ids[i], new[] { 1, len_text_token });
Tensor<long> input_tensor_mask = new DenseTensor<long>(attention_mask, new[] { 1, attention_mask.Length });
input_container.Add(NamedOnnxValue.CreateFromTensor("input_ids", input_tensor));
input_container.Add(NamedOnnxValue.CreateFromTensor("attention_mask", input_tensor));
result_infer = onnx_session.Run(input_container);
results_onnxvalue = result_infer.ToArray();
result_tensors = results_onnxvalue[0].AsTensor<float>();
float[] temp_text_features = results_onnxvalue[0].AsTensor<float>().ToArray();
text_features.Add(temp_text_features);
}
}
List<float> decode(float[] input_image_feature, float[] input_text_feature, long[] input_id)
{
input_container.Clear();
Tensor<float> input_tensor_image_embeds = new DenseTensor<float>(input_image_feature, image_features_shape);
Tensor<float> input_tensor_Div_output_0 = new DenseTensor<float>(input_text_feature, text_features_shape);
Tensor<long> input_ids = new DenseTensor<long>(input_id, new[] { 1, 16 });
/*
name:image_embeds
tensor:Float[1, 24, 24, 768]
name:/owlvit/Div_output_0
tensor:Float[1, 512]
name:input_ids
tensor:Int64[1, 16]
*/
input_container.Add(NamedOnnxValue.CreateFromTensor("image_embeds", input_tensor_image_embeds));
input_container.Add(NamedOnnxValue.CreateFromTensor("/owlvit/Div_output_0", input_tensor_Div_output_0));
input_container.Add(NamedOnnxValue.CreateFromTensor("input_ids", input_ids));
result_infer = onnx_session_transformer.Run(input_container);
results_onnxvalue = result_infer.ToArray();
result_tensors = results_onnxvalue[0].AsTensor<float>();
return results_onnxvalue[0].AsTensor<float>().ToList();
}
public List<BoxInfo> detect(Mat srcimg, List<string> texts)
{
float ratioh = 1.0f * srcimg.Rows / inpHeight;
float ratiow = 1.0f * srcimg.Cols / inpWidth;
List<float> confidences = new List<float>();
List<Rect> boxes = new List<Rect>();
List<string> className = new List<string>();
for (int i = 0; i < input_ids.Count; i++)
{
List<float> logits = decode(image_features, text_features[i], input_ids[i]);
for (int j = 0; j < logits.Count; j++)
{
float score = sigmoid(logits[j]);
if (score >= bbox_threshold)
{
//还原回到原图
int xmin = (int)(pred_boxes[j].X * ratiow);
int ymin = (int)(pred_boxes[j].Y * ratioh);
int xmax = (int)((pred_boxes[j].X + pred_boxes[j].Width) * ratiow);
int ymax = (int)((pred_boxes[j].Y + pred_boxes[j].Height) * ratioh);
//越界检查保护
xmin = Math.Max(Math.Min(xmin, srcimg.Cols - 1), 0);
ymin = Math.Max(Math.Min(ymin, srcimg.Rows - 1), 0);
xmax = Math.Max(Math.Min(xmax, srcimg.Cols - 1), 0);
ymax = Math.Max(Math.Min(ymax, srcimg.Rows - 1), 0);
boxes.Add(new Rect(xmin, ymin, xmax - xmin, ymax - ymin));
confidences.Add(score);
className.Add(texts[i]);
}
}
}
float nmsThreshold = 0.5f;
int[] indices;
CvDnn.NMSBoxes(boxes, confidences, bbox_threshold, nmsThreshold, out indices);
List<BoxInfo> objects = new List<BoxInfo>();
for (int i = 0; i < indices.Length; ++i)
{
BoxInfo temp = new BoxInfo();
temp.text = className[i];
temp.prob = confidences[i];
temp.box = boxes[i];
objects.Add(temp);
}
return objects;
}
}
}
下载
更多【c#-C# Open Vocabulary Object Detection 部署开放域目标检测】相关视频教程:www.yxfzedu.com
相关文章推荐
- java-10-27 maven概念 - 其他
- java-Maven的总结 - 其他
- 学习-【Azure 架构师学习笔记】-Azure Storage Account(5)- Data Lake layers - 其他
- 人工智能-高校为什么需要大数据挖掘平台? - 其他
- 数码相机-立体相机标定 - 其他
- java-java计算 - 其他
- python-前端面试题 - 其他
- git-IntelliJ IDEA 2023.2.1 (Ultimate Edition) 版本 Git 如何合并多次的本地提交进行 Push - 其他
- 音视频-中文编程软件视频推荐,自学编程电脑推荐,中文编程开发语言工具下载 - 其他
- node.js-npm install:sill idealTree buildDeps - 其他
- 编辑器-vscode 访问本地或者远程docker环境 - 其他
- git-IntelliJ IDEA 2023.2.1 (Ultimate Edition) 版本 Git 如何找回被 Drop Commit 的提交记录 - 其他
- 算法-力扣第1035题 不相交的线中等 c++ (最长公共子序列) 动态规划 附Java代码 - 其他
- java-JavaWeb课程复习资料——idea创建JDBC - 其他
- python-Python---列表的循环遍历,嵌套 - 其他
- python-Python的版本如何查询? - 其他
- java-IDEA 函数下边出现红色的波浪线,提示报错 - 其他
- 算法-算法通关村第八关|白银|二叉树的深度和高度问题【持续更新】 - 其他
- 算法-C现代方法(第19章)笔记——程序设计 - 其他
- git-IntelliJ Idea 撤回git已经push的操作 - 其他
2):严禁色情、血腥、暴力
3):严禁发布任何形式的广告贴
4):严禁发表关于中国的政治类话题
5):严格遵守中国互联网法律法规
6):有侵权,疑问可发邮件至service@yxfzedu.com